ロコムーブとは? - 歩いているときを疲労回復のチャンスに変える
寝ている時間以外、人間は立ったり・座ったりしています。その間、同じ姿勢で、体重を止まった状態で同じ筋肉で支え続けていると運動器組織に疲労が蓄積します。この同じ筋肉で体重を支え続けることから起こる運動器組織の疲労回復のために、歩行という機会を活用するのがロコムーブです。
![]() そこで、ロコムーブは骨格を中心に体重を支える姿勢を歩行中に作り出し、軟部組織(筋肉、靭帯、筋膜など)を体重を支える仕事から開放します。
そこで、ロコムーブは骨格を中心に体重を支える姿勢を歩行中に作り出し、軟部組織(筋肉、靭帯、筋膜など)を体重を支える仕事から開放します。
![]() ロコムーブの歩行フォームは骨格を中心に体重を支えつつも、最低限の筋活動を左右一対の筋肉群の交互のサイクルで体重を支えることで、どの筋肉にも継続的に負荷がかかること無く、運動器組織の疲労を回復します。
ロコムーブの歩行フォームは骨格を中心に体重を支えつつも、最低限の筋活動を左右一対の筋肉群の交互のサイクルで体重を支えることで、どの筋肉にも継続的に負荷がかかること無く、運動器組織の疲労を回復します。
![]() そのような動きができるようになるために、筋骨格系の構造に対して合理的・調和的な動作が自然な動きとしてできるように神経系にその動きを刷り込んでいくための方法論がロコムーブです。
そのような動きができるようになるために、筋骨格系の構造に対して合理的・調和的な動作が自然な動きとしてできるように神経系にその動きを刷り込んでいくための方法論がロコムーブです。
実は立っていても座っていても疲れる
下のシルエットを見てください。どちらも楽な姿勢でいるように見えます。しかし、実はそれぞれ沢山の筋活動を要する姿勢でいるのです。
 |
 |
| 椅子に座っていて楽そうに見えますが、背中が丸くなっている分だけ、頭が前に出てしまいます。その頭の重さを支えるため、首の筋肉が継続的にずっと頭の重さを引っ張り続けています。
また、腰椎が曲がったまま長い時間固定されるので、腰椎が上からの圧迫のストレスにさらされています。 |
腕を組んで楽に立っているように見えますが、骨盤が後継しているため頭が前に出てしまいます。それを腕組みをすることでつっかえ棒をして支えていますが、それでも頭の位置が重心より前に出るため、首の筋肉でそれを引っ張って支えています。
また、骨盤が後傾しているために腰椎が曲がったまま上からの圧迫のストレスにさらされています。 |
どうやって歩けば疲労回復になるの?
それではロコムーブが定義する筋骨格系組織の疲労を回復できるような合理的・調和的に制御するための動作とはどのようなものなのでしょうか?
大きな要点としては…
![]() 体重支持を軟部組織でなく、骨格中心に行う立ち方、動き方
体重支持を軟部組織でなく、骨格中心に行う立ち方、動き方
![]() 位置エネルギーを効率的に運動エネルギーに変換し、少ない筋活動で身体移動ができる体の動き
位置エネルギーを効率的に運動エネルギーに変換し、少ない筋活動で身体移動ができる体の動き
![]() 膝、腰、背中が曲がったところに圧迫ストレスがかからない体の動き
膝、腰、背中が曲がったところに圧迫ストレスがかからない体の動き
![]() 身体を移動させるために矛盾がなく、一着地当たりの移動距離が最大になる体の動き
身体を移動させるために矛盾がなく、一着地当たりの移動距離が最大になる体の動き
![]() 回旋しにくい腰椎を捻らない身体の動き
回旋しにくい腰椎を捻らない身体の動き
下の動画を見てみてください。ロコムーブに取り組まれる前後の歩き方です。ロコムーブに取り組むことで筋骨格系と合理的・調和的に制御するための動作のイメージが掴めるものと思います。
ロコムーブに取り組む前・・・ヒザが曲がって、骨盤が後傾しており、そのため背中が丸くなることで前後のバランスを取っています。この姿勢だと、体を支えるために筋肉の活動やその他の軟部組織に体重を預けざるをえず、何十年という負荷の蓄積の中で変形が進んでしまいます。長い目で見て、腰やヒザへのダメージが心配です。
ロコムーブに取り組んだ後・・・骨盤が上に引き上げられ高い股関節位置から脚を振り出し、着地した後はしっかりを地面を蹴っている様子が伺えます。背骨が緩やかなS字カーブを描いて骨格で体を支えることができ、筋肉の無用な緊張がありません。
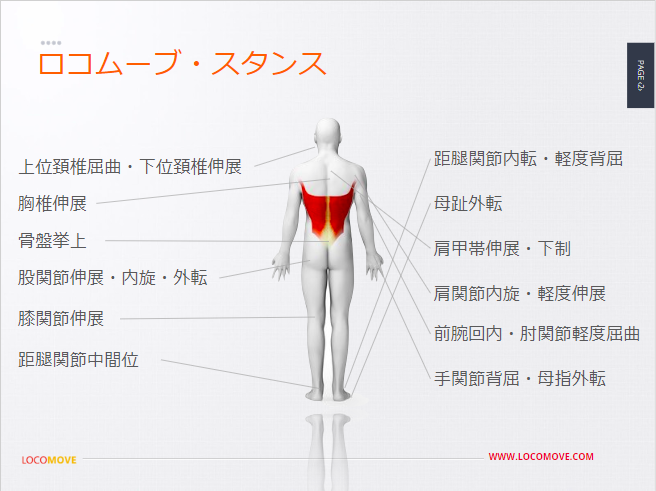
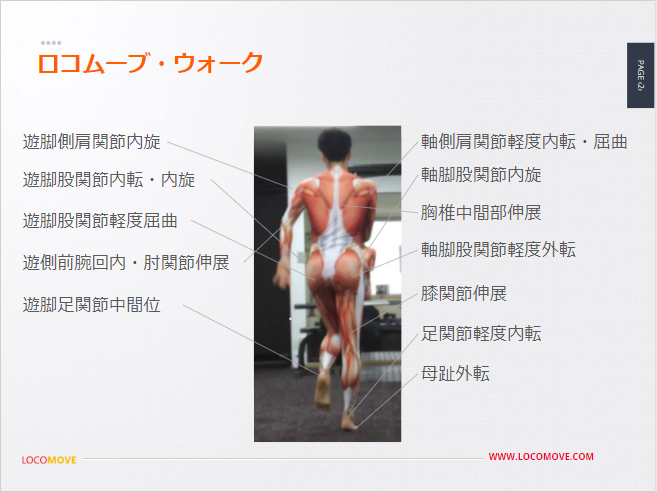
この要点を満たすための具体的な動作を示します。動作の前提となる立った時の姿勢であるロコムーブ・スタンス、歩行の時の動作であるロコムーブ・ウォークがあります。それぞれの動作の理想形を関節の角度で表現します。
- ロコムーブ・スタンス
-
- 上位頚椎軽度屈曲・下位頚椎伸展
- 胸椎伸展
- 骨盤挙上
- 股関節軽度伸展・軽度外転・内旋
- 膝関節伸展
- 距腿関節内転・軽度背屈
- 母指外転
- 肩甲帯軽度伸展・下制
- ロコムーブ・ウォーク
- 遊脚側肩関節内旋
- 遊脚股関節内転・内旋
- 遊脚股関節軽度屈曲
- 遊脚前腕回内・肘関節伸展
- 遊脚足関節中間位
- 軸側肩関節軽度内転・屈曲
- 軸脚股関節内旋
- 胸椎中間部伸展
- 軸脚股関節軽度外転
- 軸脚膝関節伸展
- 軸脚足関節軽度内転
- 軸足母指外転
- 軸側広背筋伸張
- 遊脚側広背筋収縮
自然と正しい動きができるように神経系に刷り込むためのロコムーブ・トレーニング
人はそれぞれ自分が慣れ親しんだ動き、姿勢があり、ある動きをしようとしても突然することは難しいものです。また、立つ・歩くといった基本的な動作は無意識的に行われるもので、正しい動きを無意識的にできるようになるためには神経系の自然な制御として刷り込んで行く必要があります。この刷り込みのために行うのがロコムーブ・トレーニングです。
ここからはロコムーブ・トレーニングを種目ごとに解説していきます。
フェニックス
フェニックスは歩行動作の中で腕を後ろに振る時に、胸椎と、肩甲帯が同時に伸展する動きを強調するための動作です。胸椎と肩甲帯が同時に伸展することで、広背筋が活性化して骨盤が上に引き上がると体の重心が高くなります。
カンガルー
カンガルーは歩行動作の中で、足が前に出て股関節が曲がっていって、その時に股関節を伸ばす筋肉群が引っ張られていくことで緊張が起こり、その引っ張りを解いた瞬間に、勢いよく股関節を伸ばす筋肉群が縮んでいくところを強調しています。これは、足が前に出た後に、そこからその足が地面に向かって勢いよく叩きつけられる動きです。地面に勢いよく叩きつけられた足はそのまま上に向かう地面反力を生み出し、体の重心は高くなっていきます。
チーター
チーターは歩行動作の中で、足を前に振り出していく側の骨盤が高く上がるように、広背筋を主動筋として作用させて骨盤を挙上させる動きを強調したものです。骨盤が挙上することで、前に振り出された足の付け根は高い位置を獲得することになり、足が着地した時には、膝がほぼ真っすぐ伸びて体の重心が高くなります。
厳密に正しい動きができるように指導するロコムーブ・レッスン
ロコムーブ・トレーニングは神経系に正しい動きを刷り込むためものであり、その効果を求めるならば動作にはかなりの厳格さが必要です。そこで、株式会社ロコムーブでは、ロコムーブ・トレーニングの指導を行っています。