この『ロコムーブの理論と実践』はVer. 4.0(2019/6/12更改)です。
ロコムーブとは何か
ロコムーブとは、腰椎の伸展という人類が遂げた進化からの成果をより完全に享受するために、さらに胸椎をも伸展させるという新たな進化を目指すその概念である。
本書は胸椎伸展という人類がなすべき進化を実現可能な運動学習プログラムと共に提唱するものである。その概念を理解できるように順を追って解説していく。
まずは、腰椎の伸展という人類が遂げた進化の成果を再確認する。その腰椎伸展という人類進化の成果が現れるのが、生理的弯曲とランチョ・ロス・アミーゴ方式による歩行である。現代において長寿化が進んでいることに照らして、老化を経た後の生理的弯曲とランチョ・ロス・アミーゴ方式による歩行における課題を確認する。そして、胸椎の伸展によって活用されるようになるいくつかの身体機能について解説する。さらには、胸椎伸展によって身体移動機能が向上する様子を歩行や様々なスポーツにおける動作で確認する。
そして、実際に胸椎の伸展を実現するために実践可能な運動学習プログラムについて解説する。それらの身体機能によって、胸椎伸展という進化の利点を説明する。
なお、本書では生理的弯曲、ランチョ・ロス・アミーゴ方式、倒立振子モデルなど解剖学や歩行分析関連の用語が用いられるが、用語そのものの解説は控える。それらについては予備知識をもつか、適宜他を参照しながら読まれたい。
目次
1. 腰椎伸展の成果の再確認
2. 生理的弯曲の老化に関する議論
3. ランチョ・ロス・アミーゴ方式における老化に関する議論
4. アスリートの怪我に関する議論
5. 胸椎伸展という新たな人類の進化
5-1. 胸椎伸展位の立位
5-2. 左右の広背筋の活動サイクルの形成
5-3. 股関節伸展筋群の伸張性収縮
5-4. ウィンドラス機構の効果の最大化
6. 胸椎伸展による身体移動機能の向上
6-1. 歩行
6-2. ランニング
6-3. ゴルフスイング
6-4. ピッチング
6-5. バッティング
7. 胸椎伸展のための運動学習プログラム
付録:ロコムーブ・ウォークのランチョロスアミーゴ方式との比較
1. 腰椎伸展の成果の再確認
人類を他の類人猿と比較した場合、人類の特徴のうちの一つが腰椎の伸展である。この腰椎の伸展によって、身体重心が股関節の直上に配置されるようになり、鉛直的に身体が配置される立位が形成されることになった。その鉛直的な立位配置と二足歩行によって、倒立振子モデルによる身体移動が可能になった。
この倒立振子モデルによる身体移動は革命的な成果である。この章ではその成果の大きさを再確認する。
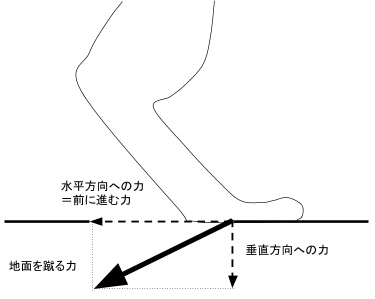
倒立振子モデル以前は足部で地面を蹴ることによって身体移動果たしていた。倒立振子モデル以前の身体移動においては地面に加えられた力は垂直方向の力と、水平方向の力に分解される。そして、身体を前進させる力は水平方向に分解された力に限定される。結果として足部が地面に加えた力に対して、身体を前進させる力は減衰する。
一方、倒立振子モデルは、位置エネルギーを運動エネルギーに転換するモデルである。位置エネルギーを失いながら運動エネルギーを得るフェーズと、位置エネルギーを回復するフェーズが交互に現れる。
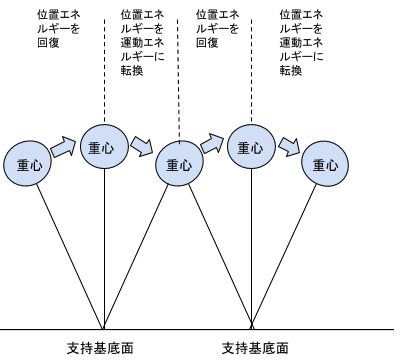
倒立振子モデル
位置エネルギーを失いながら運動エネルギー得るフェーズは、ランチョ・ロス・アミーゴ方式でいうところの立脚中期から後期該当する。身体全体が転倒していき、その転倒によって運動エネルギーを得る。転倒にはこれといった摩擦がなく、位置エネルギーから運動エネルギーへのエネルギー転換はほぼ減衰なく行われる。
歩行における位置エネルギーの運動エネルギーへの転換
また、位置エネルギーを回復するフェーズはランチョ・ロス・アミーゴ方式でいうところの初期接地から立脚中期に該当する。立脚側の股関節伸展筋群と膝関節伸展筋群の短縮によって再び身体重心位置が高くなる。この際には筋肉の短縮方向と力が作用する方向はほぼ一致しており、力の分解は行われず力に減衰もほぼなされない。
歩行における位置エネルギーの回復
このように倒立振子モデルによる身体移動はそれ以前の地面を蹴る身体移動よりもエネルギーの減衰抑えて効率的に身体移動を行うことができる。
動物として、身体移動によって食べ物を得たり、外敵から逃れる上で、エネルギー効率が高いということは非常に重要な要素である。人類の繁栄にこの点が大きく寄与して来たことは疑いようがない。
現代において実際に身体移動によって狩りや採取を行い食べ物を得ることは無い。また、外敵に追われて走って逃げる機会もほとんどない。しかし、そんな現代でも倒立振子モデルによって身体移動の能力が向上している様子を様々なスポーツの中に認めることができる。
下に示したのは、その一つの例として、ボールを投げる動作の連続写真である。身体が転倒していき、重心位置が下がっていくことで位置エネルギーが運動エネルギーに転換されていることがわかる。

ボールを投げる動作における位置エネルギーの運動エネルギーへの転換
人類は投げることに関して類まれな能力を持っているが、その能力は倒立振子モデルによる身体移動に依拠している。
このように人類は腰椎の伸展によって倒立振子モデルによるエネルギー効率の良い身体移動を実現した。その成果は人類の繁栄に大きく寄与するものであるが、現状は進化の途上であり未だに倒立振子モデルによる恩恵を完全には得られていない。その現状を現しているのが、生理的弯曲である、ランチョ・ロス・アミーゴ方式による歩行である。次の章では生理的弯曲に注目し、倒立振子モデルの恩恵を完全に得られていない点について見ていく。
2. 生理的弯曲の老化に関する議論
腰椎伸展という進化からの成果を現しているのが生理的弯曲とランチョ・ロス・アミーゴ方式による歩行である。この章ではそのうち、生理的弯曲について確認する。
生理的弯曲とは腰椎の前弯と、胸椎の後弯である。この生理的弯曲は、身体が上下動する際に頭部にかかるショックを腰椎の伸展と胸椎の屈曲によって和らげるためだと言われる。しかし、脊椎の下部にはさらに股関節、膝関節、距腿関節があり、それらの可動域は脊椎の可動域よりも大きい。ショックの吸収を敢えて関節可動域の小さな脊椎によって行う必要はないものと思われる。
多くの類人猿においては腰椎と胸椎がどちらも後弯している。人類においては腰椎が前弯するという進化を経て現在に至っている。腰椎が前弯し一方で胸椎が後弯しているのは、ただ腰椎が先に進化を遂げただけで、胸椎が後弯していることについての積極的な理由は無いのではとも考えられる。
もしそうだとすれば将来、胸椎が伸展するという進化を遂げることには不思議は無い。
なぜ、積極的に胸椎は伸展すべきかというと、胸椎の後弯を起点として、老化のプロセスを経ると、胸椎をさらに屈曲させていき、胸椎が屈曲位で固定されるようになるからである。
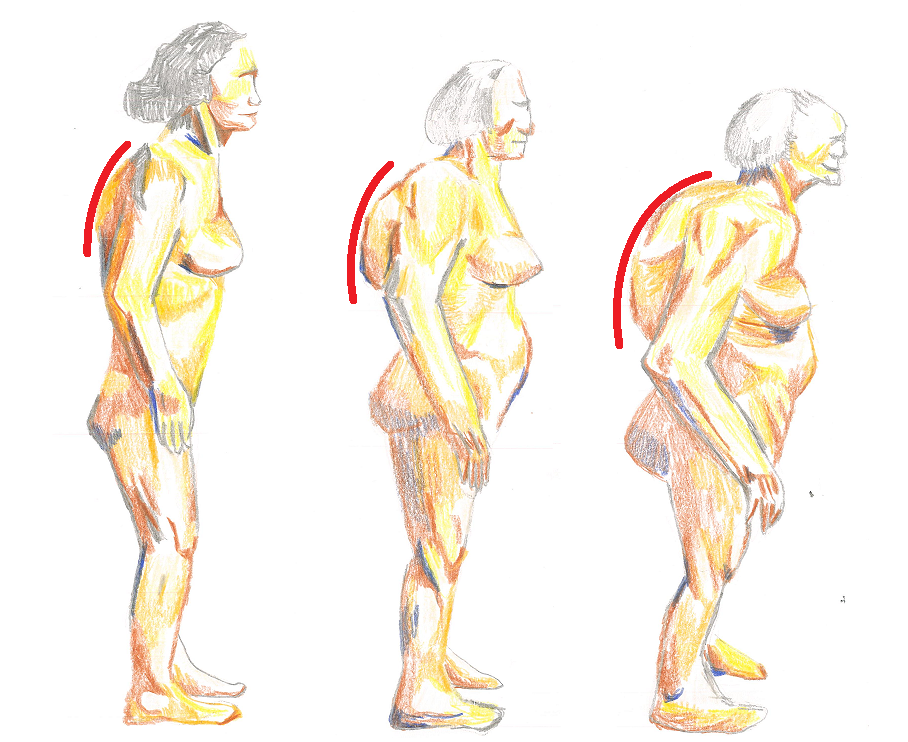
老化による胸椎屈曲の進行の様子
そして、胸椎の屈曲位固定によっていくつかの機能面での不利が認められるからである。その不利についてここから説明する。
位置エネルギーの低下
胸椎の後弯は脊椎をカーブさせるため、立位において身長を短くする。結果として身体移動時の位置エネルギーが低下する。倒立振子モデルによる身体移動で、位置エネルギーを運動エネルギーに転換させるにあたって、その位置エネルギーが胸椎の後弯によって低下されてしまってはその恩恵を完全に受けることはできない。
これがさらに老化によって胸椎の屈曲が進みかつ、屈曲位で固定されるようになると位置エネルギーはさらに低下し、倒立振子モデルがほとんど機能しなくなる。そうなると、ランチョ・ロス・アミーゴ方式でいうとことの立脚終期が省略され、荷重応答期が延長される。立脚終期は位置エネルギーが運動エネルギーに転換される区間である。その省略は、支持基底面対して身体重心が進行方向に押し出されることがなくなるということである。結果として一着地辺りの重心移動距離が短くなる。即ち歩幅が短くなる。
老化によって信号が青であるうちに横断歩道を渡りきれなくなるなどの安全上深刻な問題になる。さらには、歩幅の短さと認知症との相関も指摘されている。
臓器の圧迫
胸椎の後弯は、老化によって胸椎の屈曲が進むと、臓器を圧迫し始める。その一つとして肺を圧迫することで呼吸がしにくくなる。胸椎の屈曲はさらに頚椎下部の屈曲と頚椎上部の伸展を引き起こす。結果として気道狭めさらに呼吸を難しくする。
他の類人猿では腰椎と胸椎の両方が後弯しているところから人類は腰椎が前弯するするという進化を遂げた。胸椎は今でも後弯しているが、胸椎の後弯は、老化のプロセスを経ると胸椎の屈曲位固定につながる。ここで述べたようにいくつかの身体機能上の不利を生み出す。
人類は長寿化している。以前であれば胸椎の屈曲がさほど進んでいない時点で生涯を終える可能性が高かったが、長寿化によって胸椎の屈曲が大いに進行するまで人生が長くなっている。長寿化によって以前はさほど問題ではなかったかもしれない胸椎の後弯が、大きな課題になっているのである。
次の章では、身体移動に注目するためにランチョ・ロス・アミーゴ方式よる歩行についてこの胸椎の後弯に基づく不利について見ていく。
3. ランチョ・ロス・アミーゴ方式における老化に関する議論
ランチョ・ロス・アミーゴ方式も腰椎伸展という進化からの成果を現している。この章ではランチョ・ロス・アミーゴ方式について確認する。
倒立振子モデルにおいては位置エネルギーを運動エネルギーに転換するフェーズと、位置エネルギーを回復するフェーズが交互に現れる。
位置エネルギーを回復するフェーズは前述したように初期接地から立脚中期にかけて該当する。特にこの区間にある荷重応答期に注目する。
荷重応答期には膝関節を屈曲させながら、大腿四頭筋を伸張性収縮させ、大腿四頭筋に強い張力を生む。その反動で大腿四頭筋を短縮させ膝関節を伸展させる。それによって位置エネルギーが回復され、立脚中期に至る。この大腿四頭筋の伸張性収縮から短縮する動きが、現時点での位置エネルギー回復のための方式である。そのメカニズムをロッカーファンクションとともに捉えたのがランチョ・ロス・アミーゴ方式である。
前述したように老化によって胸椎の屈曲が進み、かつ屈曲位で固定化する。そうなると、身体重心位置が下がり、倒立振子モデルが機能しなくなる。立脚終期が省略され、荷重応答期が延長される。結果的に大腿四頭筋が伸張性収縮する期間が長くなる。
さらに、倒立振子モデルが機能しなくなると、遊脚の前方への着地によって進行方向への移動を実現しようとするようになる。これは本人の身体移動の戦術の変化でもあるが、同時に治療家の治療方針にも反映される。歩行のリハビリにおいて腸腰筋の機能が注目され、腸腰筋のトレーニングがリハビリの現場で盛んに行われている。腸腰筋の機能を活性化し、遊脚を前方に振り出す能力を高めようとしている。
長寿化によって、多くの人が老化が進行した後の人生を長く生きることを考えると、ランチョ・ロス・アミーゴ方式を前提とした身体移動は、大腿四頭筋と腸腰筋の機能を強調した動作に変化していく。どちらの筋肉も股関節の屈曲筋である。これらの2つの筋肉の活動が強調されることによって、股関節は屈曲する。股関節の屈曲に体重支持が適応されるため、膝関節は屈曲し、腰椎及び胸椎は屈曲し、支持基底面上の重心位置は後方に配置される。
前章と本章において胸椎の後弯が老化によって胸椎屈曲位が進み、固定化されることによって様々身体機能の不利が生じることを見てきた。次の章では老化とは別の問題としてアスリートの怪我の観点から胸椎の後弯にまつわる課題を見ていく。
4. アスリートの怪我に関する議論
アスリートの怪我に膝及び下腿の怪我がある。膝及び下腿の怪我の元となる関節運動として以下が考えられる。
●軸脚股関節の内転
●膝関節の屈曲と外反
●下腿外旋
上記の関節運動によって前十字靭帯、半月板などに損傷を受けやすい。これらの関節運動が起こるのは片脚支持においてである。片脚支持時に体幹を適切なバランスで支えきれずに、歩行分析でいうところのトレンデレンブルグ歩行的、または逆にデュシェンヌ歩行的な体重支持の兆候を示すところが原因していると考えられる。
これは日常的な動作においても片脚支持において骨盤より上部の体幹を支持するにあたって、腸脛靭帯による代償、側腹筋による代償、遊脚側外転筋群による代償などが行われていることがその原因である。
本来、片脚支持において体幹を支えるべきは股関節外転筋群および股関節内転筋群であるが、その中でも特に殿筋群に注目すると、殿筋群はもともと筋紡錘の密度が低く荷重応答がさほど得意な筋肉ではない。
さらに、S字型のアライメントにおいては骨盤が後傾しやすく、殿筋群は短縮しがちである。アライメント上、殿筋群が短縮しがちであり、元より筋紡錘も少ないため、殿筋群が片脚支持のための荷重応答の機能を果たせていないことがある。そのため片脚支持においては腸脛靭帯による代償、側腹筋による代償、遊脚側外転筋群による代償などが行われる結果になる。骨盤の後傾が起こりやすくなる胸椎の後弯がその代償関係の原因の一部になっている。
前前章、前章と本章において胸椎の後弯が老化によって、またはスポーツにおいて身体機能の不利が生じることを見てきた。次の章では胸椎の伸展することで、新たに有効になる身体機能について説明していく。
5. 胸椎伸展という新たな人類の進化
ロコムーブとは、腰椎の伸展という人類が遂げた進化からの成果をより完全に享受するために、さらに胸椎をも伸展させるという新たな進化を目指すその概念である。この章ではまず、胸椎伸展位での立位であるロコムーブ・スタンスについて解説し、さらにはその胸椎伸展によって新たに有効になる身体機能について説明していく。
5-1. 胸椎伸展の立位
ロコムーブ・スタンスは胸椎伸展位における立位を規定するものである。胸椎と肩甲帯が伸展した状態で、広背筋の開放性運動連鎖による活動を誘導するための事前の立位姿勢である。重心位置を高く保ち、かつ、重心を前方に位置する。
以下のような立位姿勢になる
●重心位置の高く保つ。足部MP関節(母子球の並びの関節です)上に背骨が位置するようにして、頭の方に伸ばす。
●支持基底面である足の裏の安定性限界の前方縁に足圧がかかるように立つ。
さらに体の主な関節の位置関係を挙げる。
上位頚椎軽度屈曲・下位頚椎伸展
あごを引く。結果、頚椎の下部が伸展し、上部が屈曲する。
胸椎伸展
みぞおちを引き上げる。
骨盤挙上
骨盤を立てる。
股関節軽度伸展・軽度外転・内旋
足が股関節の真下に位置するようにして、まっすぐ立つ。
膝関節伸展
膝関節を屈曲させずに立つ。
距腿関節内転・軽度背屈
両足の外側が並行になるように立ち、前方に重心をかける。
母指外転
足の親指を足の外側方向に開く。
肩甲帯軽度伸展・下制
胸を開いて、肩が自然と後ろに落ちるに任せる。
ロコムーブ・スタンス
腰椎の伸展を経て現在の立位を獲得した人類にとってこのロコムーブ・スタンスは新しい立位である。これを図式化すると、腰椎・胸椎とも屈曲している類人猿はC字型、腰椎が伸展した人類はS字型、胸椎も伸展した新しい立位はI(イタリックI)字型である。Iがイタリック体なのは重心位置が支持基底面上前方にあるためである。

アライメントの進化
このイタリックI字型の立位を前提とした身体移動において活性化されていく身体機能について次のセクションから説明していく。
5-2. 左右の広背筋の活動サイクルの形成
胸椎の伸展と肩甲帯の伸展が連動的に起こると、広背筋の活動が活性化される。この広背筋の活動によって身体移動において位置エネルギーの回復に活用することができる。
左右一方の広背筋が短縮すると、もう一方が伸張して張力が発生し、次に短縮するフェーズに入るとその張力によって素早く短縮するという左右交互の短縮と伸張のサイクルを形成することによって、身体移動における重心位置を効率的に高めることができる。左右一対の広背筋の活動サイクルによって、どのように身体重心位置が高まるのかをこれより具体的に説明する。
広背筋は左右一対の筋肉で、第5胸椎から第5腰椎の棘突起、仙骨、腸骨稜、第9〜第12肋骨を起始とし、上腕骨の上部小結節稜で停止する筋肉である。広背筋は上肢と下肢の両方の骨格に付着している唯一の筋肉で、下肢については骨盤だけでなく腰椎、胸椎を非常に幅広く付着していることが特徴である。
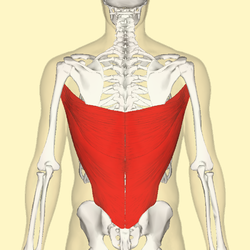
広背筋
左右の広背筋の短縮と伸張の交互のサイクルは身体移動全般において身体重心位置を高める作用を持つが、ここでは説明のためのモデルとして歩行動作における左右の広背筋の短縮と伸張のサイクルが持つ作用を説明する。
歩行動作においては、この左右の広背筋の短縮と伸張のサイクルは、空中脚側広背筋の短縮と、着地脚側広背筋の伸張という形で起こる。左右の脚の空中脚と着地脚の役割が交代すると、同じように交代した空中脚側広背筋の短縮と、着地脚側広背筋の伸張が起こり、その左右の脚の役割の交代によって左右の広背筋の短縮と伸張のサイクルが形成される。
空中脚側の広背筋の短縮が起こると、この時の空中脚側の広背筋は起始点も停止点も固定されておらず、開放性運動連鎖における筋活動になる。広背筋を開放性運動連鎖によって短縮させると、上腕骨が背中の中央方向かつ下方に引き寄せられるのと同時に、胸椎、腰椎、骨盤が上腕骨方向に引き寄せられる。
特に胸椎、腰椎、骨盤の上腕骨方向への接近に注目すると、これは冠状面において中央に位置する胸椎、腰椎、骨盤が左右の上腕骨の方向に接近するということである。もし、左右の広背筋が同時に収縮しようとすると、相互の広背筋がお互いに相反することになる。
よって、左右一方の広背筋が短縮している際、もう一方の広背筋は伸張することによって、胸椎、腰椎、骨盤の上腕骨方向への接近はより強調される。そのため、空中脚側広背筋を短縮させる際、着地脚側広背筋を伸張させることでその作用をさらに強調することができる。
この空中脚側広背筋の短縮と、着地脚側広背筋の伸張によって、以下の2つの効果が発生する。
①空中脚側骨盤の挙上と着地脚側骨盤の下制
②着地脚側の股関節を中心とした骨盤、腰椎、胸椎の連動的内旋
これより、その2つの効果について説明する。
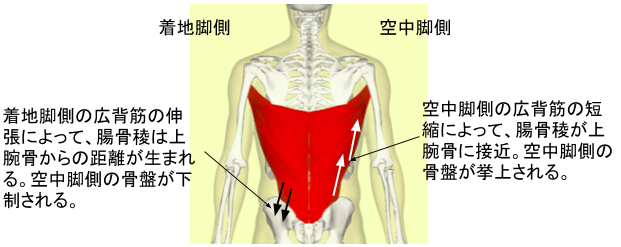
①空中脚側骨盤の挙上と着地脚側骨盤の下制
空中脚側広背筋の短縮によって空地脚側腸骨稜が上腕骨側に接近する。そのため、空中脚側の骨盤が挙上される。一方で着地脚側広背筋の伸張によって、着地脚側腸骨稜は上腕骨からの距離が生まれる。結果的に、着地脚側の骨盤は下制される(下図参照)。
身体移動は位置エネルギーの蓄積のフェーズと、蓄積された位置エネルギーを運動エネルギーに転換するフェーズが交互にやってくる。
ロコムーブが意図するように空中脚側の広背筋を短縮させると、空中脚側の骨盤と胸郭が挙上され、空中脚側の位置エネルギーが高まる。
この位置エネルギーが高まった空中脚側は脚が振り下ろされる際に高い位置から振り下ろされることになる。高い位置から振り下ろされた脚は着地する際に、関節が伸展気味に着地することになり、この着地した脚によって体重支持をする時には身体重心は伸展気味な脚に支えられて高い位置にあることになる。
結果として、蓄積された位置エネルギーを運動エネルギーに転換するフェーズにあっても空中脚側の広背筋の短縮によって、失われた位置エネルギーを同時的に回復することになる。結果的に一着地あたりの移動距離を伸ばすことになる。
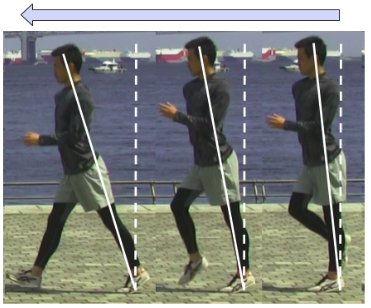
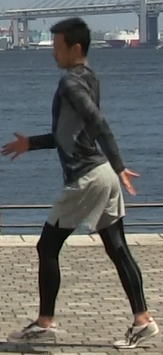
下の写真は身体移動の中でも歩行において、空中脚側の広背筋の短縮によって、同側の位置エネルギーが高まっている様子を写した連続写真である。
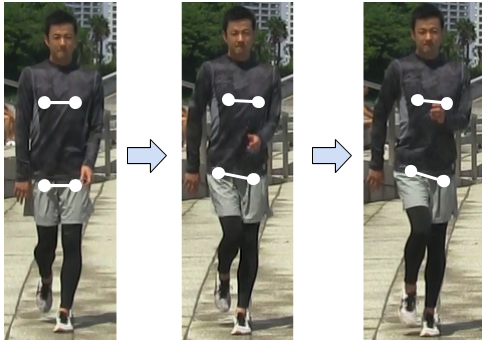
歩行における空中脚側骨盤の挙上と着地脚側骨盤の下制
②着地脚側股関節を中心とした骨盤、腰椎、胸椎の連動的内旋
空中脚側の広背筋の短縮によって胸椎と腰椎が上腕骨側に接近する。その胸椎、腰椎、骨盤のモーメントにより、着地脚側の股関節は内旋する。(下図参照)
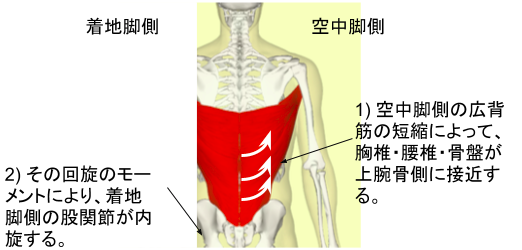
着地脚側の股関節の内旋
この着地脚側の股関節の内旋によって身体重心は進行方向に向かって移動する。(下図参照)
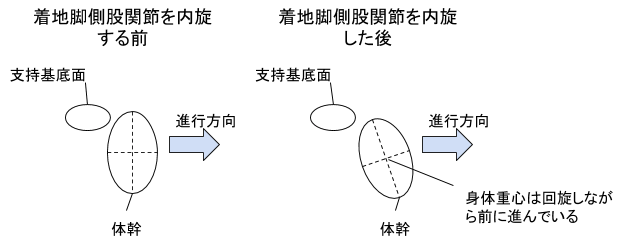
身体重心が前進することによって、身体が転倒することによって蓄えられた位置エネルギーを運動エネルギーに転換する際に、転倒の角度を素早く与え、より素早く位置エネルギーから転換された運動エネルギーをロス少なく進行方向への移動距離に結実できるようになる。(下図参照)
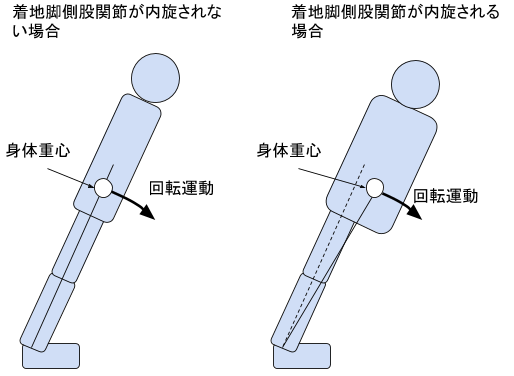
この空中脚側広背筋の短縮によって着地脚側股関節の内旋をさせることの特長として、胸椎、腰椎、骨盤が連動して股関節の内旋と同じ回旋のモーメントを得ることで、脊椎に捻じれのストレスを生まないことがある。
股関節の内旋は広背筋に活動によらずとも実現できる。股関節の内旋の主働筋は小殿筋や大腿筋膜張筋であるが、これらの筋肉は直接骨盤と大腿骨に付着し、それらの位置関係を変えることによって股関節の内旋を起こす。その場合、骨盤の上部に位置する腰椎、胸椎は慣性によって股関節を中心とした骨盤の回旋とはずれる力が働く。このずれる力は主に腰椎の関節に捻じれのストレスを与え、長期間に亘ってこの捻れのストレスを受け続けると腰すべり症の原因となる。
広背筋を主働筋とする股関節の内旋についてはこの捻れのストレスがないことが大きな特長である。
このセクションではイタリックI字型のアライメントを前提とした身体移動において、胸椎と肩甲帯が連動して進展することで広背筋が活性化して、位置エネルギーの回復が広背筋によって行われる様子を見た。次のセクションではまたイタリックI字型のアライメントによって股関節伸展筋群の伸長性収縮により身体移動機能が活性化されることを確認する。
5-3. 股関節伸展筋群の伸張性収縮
イタリックI字型のアライメントによって、S字型のアライメントに比べ骨盤が前傾するため股関節伸展筋群には張力が発生する。この張力を前提として、身体移動において遊脚側に股関節伸展筋群の伸長性収縮が起こり、その伸張性収縮によって次の短縮時に強い短縮のトルクを得ることができる。
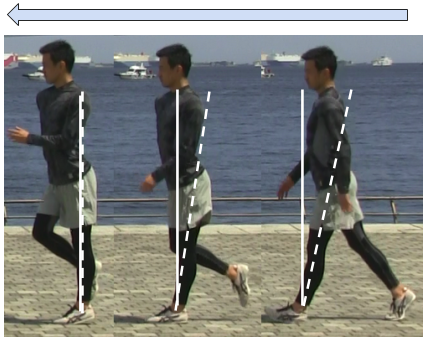
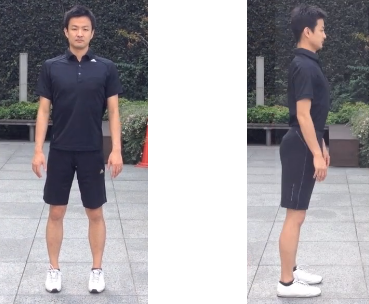
下の写真はイタリックI字型のアライメントにおける歩行を行った際の遊脚中期の様子である。遊脚側の股関節伸展筋群が大きく伸張されているのが分かる。
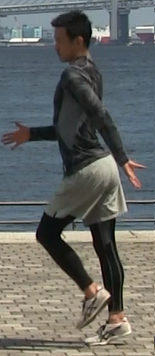
遊脚側股関節伸展筋群の伸張性収縮
遊脚側股関節伸展筋群の伸張性収縮を経た強いトルクの短縮は初期接地に向けて強い地面作用力を発揮し、進行方向への推進力になる。
このような遊脚側の股関節伸展筋群の伸張性収縮はS字型アライメントでは起こりにくい。胸椎の後弯による上肢前傾のバランスを取るため骨盤が後傾しやすくなるため、股関節伸展筋群が短縮してしまい張力が得られない。
5-4. ウィンドラス機構の効果の最大化
ウィンドラス機構はMP関節が伸展することで足底腱膜が緊張し、足部のアーチが上がる機構だが、この機構が機能するのは立脚終期である。立脚終期に進行方向への加速度を与えつつ、位置エネルギーを高める。
そのウィンドラス機構の効果を最大化するには、身体重心がこのウィンドラス機構の力が作用するベクトルの直線上に配置されていることである。
イタリックI字型のアライメントでの身体移動では立脚終期において胸郭から軸足距腿関節までが直線的に配置され、ウィンドラス機構の作用する、進行方向への加速度と位置エネルギーの増加の力をもっとも効率よく伝えることができる。

ウィンドラス機構の効果の最大化
ここまで、胸椎伸展によって身体移動の機能が活性化していくことを確認してきた。現時点での人類の胸椎は後弯しているにも関わらず、胸椎が進展すると、それに呼応して広背筋、殿筋群が活性化し、ウィンドラス機構の効果が高まるということには、この胸椎伸展という進化が予定されていたのではないか思えるほどであり、不可思議である。
次の章では歩行、走行、その他のスポーツの動作において実際にどのように身体移動機能の向上がなされるのかを見ていく。
6. 胸椎伸展による身体移動機能の向上
胸椎伸展によって歩行、走行、ピッチング、バッティング、ゴルフスイングといった身体移動動作においての機能向上を確認する。
6-1. 歩行
胸椎伸展が歩行の中でどのように身体機能を高めるかについて説明する。
下の連続写真は広背筋の活動サイクルを取り入れた歩行動作を捉えたものである。コマ送りにして説明する。

最初のコマ
胸椎は伸展している。
左脚は立脚終期である。足部はMP関節が伸展してウィンドラス機構によって足部のアーチが巻き上げられている。その力のベクトルの直線上に胸郭から距腿関節まで配置され、進行方向への加速度を与えつつ、位置エネルギーを高めている。現在着地脚側である左側広背筋はこの時点まで伸張されていたが、この時点で短縮性収縮を始めている。この左側広背筋の短縮性収縮によって左側の胸郭と骨盤の位置がどう遷移していくかは次のコマで確認したい。
右脚が初期接地をしようとしている。左足部のウィンドラス機構による位置エネルギー高まり、及び、この前段で右側の広背筋の短縮によって右半身の位置エネルギーの高まりによって、高い位置から振り降ろされた右脚が膝関節がほぼ伸展した状態であることが特徴的である。
第2のコマ

右脚は荷重応答期から立脚中期に差し掛かろうとしている。ロコムーブよる歩行は荷重応答期が非常に短いことが特徴的である。初期接地の時点から重心位置が高いため荷重応答期における膝関節の屈曲と伸展によって重心位置を高くするプロセスを経る必要が無いためである。
左脚は前遊脚期から遊脚初期に差し掛かるところである。この時点で左側の広背筋は短縮性収縮の活動をほぼ終えている。ここから先のコマでは左側広背筋の短縮は続くが、それは収縮活動によるものではなく、これまでの短縮性収縮の惰性によるものである。左側広背筋の短縮性収縮によって左側の胸郭と骨盤が前方に遷移している。右側股関節は内旋され始めている。
第3のコマ

右脚は立脚中期から立脚後期に移行しようとしている。右側の広背筋は左側の広背筋の短縮によって伸張され始めている。
左側は遊脚初期から遊脚中期にかかっている。股関節伸展筋群に張力が生まれ、伸張性収縮が起こり始めている。左側広背筋は収縮していないが惰性によって短縮している。その広背筋の短縮によって左側胸郭と骨盤はさらに前進しており、右側股関節の内旋がさらに進んでいる。かつ、左側の胸郭と骨盤が挙上されて上方に遷移している。
第4のコマ
右脚は立脚終期に入っている。右足部ではMP関節の伸展が始まりウィンドラス機構によって前方への加速度を加えつつ、位置を高めている。
左側は遊脚中期に入っている。左股関節伸展筋群は伸張性収縮している。ここまでは、左脚の膝関節は屈曲していたが、この次の瞬間に伸展を開始する。それをきっかけに左股関節伸展筋群は短縮を始める。それを次のコマで確認したい。左側広背筋の短縮は更に進み、左側胸郭と骨盤の前進はさらに強調されている。かつ、左側の胸郭と骨盤の挙上も同様にさらに強調されている。
第5のコマ
右脚は立脚終期にとどまっている。ロコムーブの歩行動作の特徴として、立脚終期が歩行サイクルの中で長いことがある。立脚終期に身体重心が低くなるべきところを、立脚足部ウィンドラス機構の活用と空中脚側の広背筋の短縮によって身体重心の高さ回復するため、より長い時間立脚終期を継続することができる。
左脚は遊脚終期である。左脚膝関節はこのコマでは伸展を始めている。この空中脚膝関節の伸展の開始をきっかけに、股関節の伸展が始まる。さらに同時に伸張されていた着地脚側広背筋が短縮に移行することで、左右の広背筋の伸張と短縮が切り替わる。この左右の広背筋の伸張と短縮の役割の切り替えのポイントを切り替え点と呼ぶ。
最後、第6のコマ

このコマは最初のコマの左右が入れ替わった場面に当たる。
右脚は立脚終期である。右足部のMP関節伸展によるウィンドラス機構が働き、進行方向への加速度を与えつつ、重心位置を高めている。右側広背筋は短縮性収縮をしている。
左脚は初期接地をしようとしている。右足部のウィンドラス機構による身体重心位置の上昇と、この前段で左側の広背筋の短縮によって身体重心が高まり、その高い位置から振り降ろされた左脚が膝関節がほぼ伸展した状態である。
下の図は歩行における拮抗する左右の広背筋の活動サイクルをまとめたものである。
歩行における左右の広背筋の活動サイクル
(一番右まで進んだら、また一番左に戻る)
ここま解説した胸椎伸展によるロコムーブの歩行によって大きく二つのメリットを歩行動作について見出すことができる。
①歩行による老化防止
多くの人々の老化の中で身体重心位置が下がっていく現象が見られる。体重支持における胸椎、腰椎、股関節、膝関節が屈曲が進み、そのため重心位置が下がっていく。さらに、腰椎が屈曲した状態が工程化し、その屈曲した状態での上下からの圧迫のストレスによって圧迫骨折などの骨、関節の変形が起こり、さらに身体重心が下がっていく。
その重心位置が下がっていく過程で痛みが起こる。椎間板ヘルニアなどの腰痛、坐骨神経痛、膝関節変形症などは重心位置を失うことによって体への負担が痛みとして表れたものである。重心位置が下がれば歩幅も短くなる。短い歩幅は認知症との相関が指摘されている。重心位置が下がりきった最終型は寝たきりである。寝ている状態では重心位置は限りなく地表に近くなる。
ロコムーブの歩行フォームを身につけることによって重心位置が高く保つ方法が学習され、日常的に行う歩行動作を通して体重支持の動作を改善し、長期に亘って老化による重心位置の低下を防ぐことができる。
体重支持における老化は重心位置の低下に現れるが、歩行における老化は、立脚終期の省略に現れる。
老化によって立脚終期の着地脚側股関節の伸展が小さくなっていき、立脚中期と区別がつかなくなっていく。歩行では支持基底面から身体重心を前方に移動させることで身体移動を行うものであるのに、立脚終期が省略されることで、身体重心が支持基底面から進行方向への前進距離は限定的になる。その結果、老化によって歩行による身体移動の効率が悪くなる。
老化によって歩みが遅くなり、青信号の時間内に横断歩道を渡り切ることができなくなる問題がある。老化による身体移動の効率低下は生活の不便ばかりでなく、安全上の問題でもある。
ロコムーブの歩行フォームを身につけることによって、立脚終期の股関節伸展が強調され、一着地あたりの身体移動距離が伸びる。それによって歩行における身体移動の効率が向上し、生活上の利便性や安全性も向上することが期待できる。
②歩行によるセルフ・トリートメント
腰痛、膝関節痛などの体重支持に痛みを感じる人が治療院に行く。治療院で痛み解消されればそこで満足し、また同じ生活習慣を続けてしまう。痛みの原因は生活習慣の中にある関節の状態と関節運動にあり、その痛みの原因が継続するかぎり痛みは何度でも起こってしまう。
痛みそのものは治療院で治すのがよいが、痛みの原因自体も解消しなければ、痛みはまたもどってきてしまう。
関節が屈曲した状態での体重支持が長期間に亘り、体重支持の負荷が特定の部分に長期間集中することで、腰痛、膝関節痛などの症状を引き起こす。腰椎が屈曲したままで固定されると、体重支持にかかる負荷によって椎間板ヘルニアを引き起こしたり、膝関節が屈曲した歩行フォームが常態化すると体重支持の負荷が膝関節に集中し、膝関節変形症などを引き起こす。体重支持において腰椎や胸椎、股関節、膝関節の屈曲は相互に関係が深く、腰椎や胸椎が屈曲してれば重心の前後のバランスをとるために股関節や膝関節も屈曲しがちであり、その反対に膝関節や股関節が屈曲していると同じように重心の前後のバランスをとるために胸椎や腰椎も屈曲しがちである。
ロコムーブの歩行フォームによって、通常であれば位置エネルギーを失うはずの立脚終期においても同時的に位置エネルギーを回復することができる。歩行周期全体を通して高い重心位置を保つことができる。それは胸椎、腰椎、股関節、膝関節を全体的に伸展させた歩行フォームを身につけることになる。
それは、痛みの原因となる関節の状態や関節運動自体を変えていくセルフ・トリートメントなのである。
6-2. ランニング
ランニングにおける左右の広背筋の活動サイクルの活動、股関節伸展筋群伸張性収縮、軸足足部のウィンドラス機構による巻き上げ、といった身体移動機能の向上のあり方は歩行に極近いものである。ランニングが歩行と異なるのは両脚が地面を離れる跳躍があることである。
下は左右の広背筋の活動サイクルがあるランニングフォームの連続写真である。
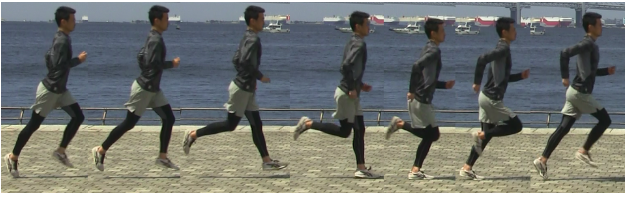
連続写真のコマは時間を追って左から右に進む。
一番左の1コマ目は歩行でいうところの右脚が立脚終期である。軸足MP関節の伸展よって側部アーチに巻き上げが起こり、その力のベクトル上に胸郭から距腿関節までが配置されている。一方、広背筋の活動サイクルとしては、これまで、伸張していた右側広背筋が緊張し短縮を始める。一方で左脚は遊脚中期で股関節伸展筋群の伸張性収縮から短縮性収縮に変わり、股関節の伸展が始まっている。
2コマ目以降も股関節左股関節は伸展を続ける。
6コマ目まで、右側広背筋は弛緩しているが1コマ目の緊張によって惰性による短縮が起こっている。
その作用によって、2コマ目から6コマ目にかけて①空中脚側骨盤の挙上と着地脚側骨盤の下制と②着地脚側股関節を中心とした骨盤、腰椎、共通の連動的内旋が起こる。
すなわち、左側骨盤の挙上と、右側骨盤の下制、そして左側股関節を中心とした骨盤、腰椎、胸椎の連動的内旋が起こる。
6コマ目で右股関節伸展筋群伸張性収縮が起こる。
一番右の7コマ目から右足膝関節の伸展が起こっている。この時点で、右股関節の伸展が始まり、今まで伸張されて来た左側の広背筋の緊張と短縮が始まる。空中脚側の膝関節の伸展によって左右の広背筋の伸張/短縮のモーメントが切り替わる。歩行における切り替え点と同じことがランニングでも空中脚側の膝関節の伸展タイミングで起こる。
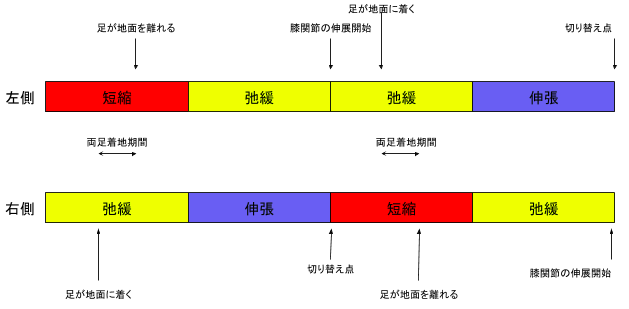
下に、ランニング時の左右の広背筋の活動のサイクルを示す。
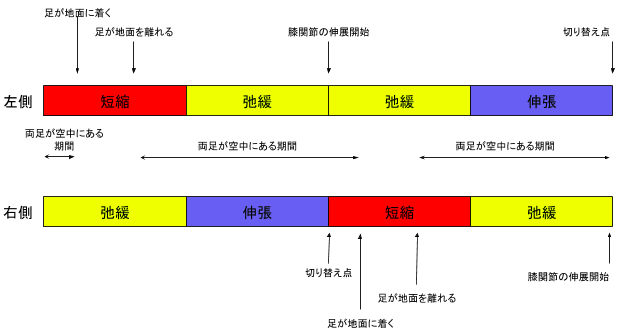
ランニングにおける左右の広背筋の活動サイクル
(一番右まで進んだら、また一番左に戻る)
ロコムーブのランニングには以下のようなメリットが期待できる。
①ランニングによる怪我の防止
空中脚側広背筋の短縮によって遊脚終期にかけて空中脚側骨盤の挙上が起こる。そのため空中脚が地面に振り出される際、より高い位置から振り出され、着地のタイミングでは股関節はより伸展位になる。
ランニングにおける着地の際は歩行に比べ体重支持の負荷が大きい。跳躍を経て着地をするためである。膝関節が屈曲した状態で着地すると、体重支持の負荷が屈曲した関節部分に集中し、それが靭帯の炎症、膝関節の変形などといった形で現れる。
ロコムーブのランニングによって、空中脚側の股関節位置が高くなり、その高い位置から振り出された脚は、着地の際に膝関節がより伸展した状態で着地することになる。結果的に膝関節の怪我の防止になる。
さらに胸郭伸展アライメントは着地脚側の股関節伸展筋群を伸張させ、股関節伸展筋群の荷重応答機能高める。膝関節よりも強靭は股関節に荷重応答機能を依存することは怪我の防止につながる。
また、別の話題になるが、ランニングにおいては着地脚側の股関節の内旋の力は歩行のときより大きくなる。その際に空中脚側の腕を後ろに振るなどして上体で逆方向の回旋の力を加えてしまい、捻れのストレスが腰椎に発生してしまうような問題のあるランニングフォームがしばしば観察される。このランニングフォームは腰すべり症など腰椎の捻りのストレスによる疾患の原因になる。
ロコムーブのランニングによって、着地脚側股関節を中心とした骨盤、腰椎、胸椎の連動的な回旋がなされ、腰椎に対する捻じれストレスを避け、腰すべり症などの疾患予防につながる。
②ランニングパフォーマンスの向上
ロコムーブのランニングによって、より速く、かつ長時間走れることが期待できる。
着地脚側骨盤の下制により、同側股関節の伸展が強調される。それによって、支持基底面からの重心位置前進が強調される。
一方、空中脚側骨盤の挙上によって空中脚側股関節の位置が高くなり、高い位置から振り出された空中脚はより高い位置での接地につながり、ランニングフォーム全体の重心位置が高くなる。重心位置が高ければ体重支持にかかる筋出力は少なくて済む。それはより少ない筋出力でより高いパフォーマンスを発揮できるランニングフォームなのである。
6-3. ゴルフスイング
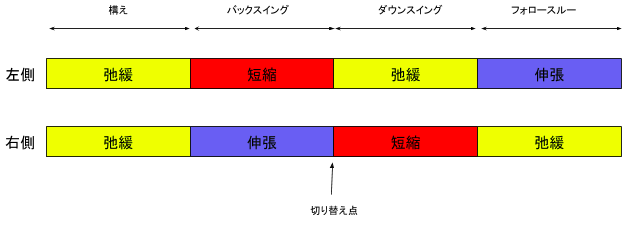
下は、ゴルフ・スイングにロコムーブの動き、主に左右の広背筋の活動サイクルを取り入れた動きである。

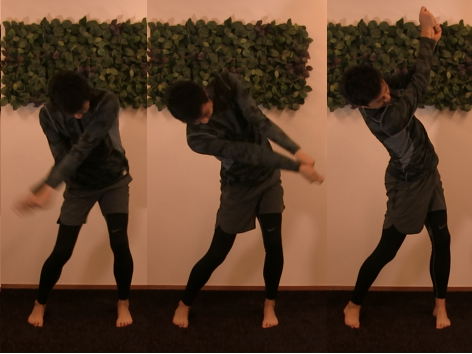
上は7コマに切り取ったアドレスからバックスイング、トップを経てダウンスイングとフィニッシュまでの動きである。
最初のコマは、アドレスである。ここから2コマ目にかけて、向って右側の広背筋が短縮する。その向かって右側の広背筋の短縮によって反対側股関節の内旋が生じ、広背筋胸郭が向って左側に回旋していく。3コマ目で向かって右側の広背筋の短縮は最大化する。一方、向かって左側の広背筋は伸張する。
それが4コマ目で切り替え点を迎える。ここからダウンスイングが開始する。今まで大きく伸張していた向かって左側の広背筋が短縮に切り替わる。向かって左側の広背筋は5コマ目、6コマ目にかけて短縮し、それによって反対側の股関節の内旋がおこり、向かって右方向に胸郭を回旋させる。その胸郭の回旋に腕が同調することでクラブを振る。一方、向かって右側の広背筋は弛緩している。
左右一対の広背筋の活動サイクルとしては下のようになっている。
ゴルフスイングにおける広背筋の活動サイクル
6-4. ピッチング
次は野球のピッチングにロコムーブの動き、主に左右の広背筋の活動サイクルを取り入れた動きを解説する。



上はピッチングの動作を10コマに切り取りとった連続写真である。1コマ目では左右の広背筋はどちらも短縮していない。それが、2コマ目で空中脚側である向かって右の広背筋が短縮する。それによって、軸脚股関節の内旋が起こり胸郭が向かって左側に回旋する。かつ、広背筋の活動によって右側の骨盤が挙上されている。
そこから3コマ目、4コマ目、5コマ目まで高い位置エネルギーを活かして投げる方向に大きく重心を前進させている。この間左右とも広背筋は弛緩している。
6コマ目になって今度は向かって左の広背筋が短縮を始める。その広背筋の短縮によって7コマ目まで非常に素早く胸郭が向かって右側に回旋していく。その胸郭の回旋に腕が同調することでスピードのある投球ができる。
8コマ目ではその広背筋は弛緩する。9コマ目、10コマ目はその惰性で骨盤の挙上と回旋が続き、胸郭はさらに回旋し、脚が浮いている側の骨盤は高く持ち上がる。
左右一対の広背筋の活動サイクルとしては下のようになっている。
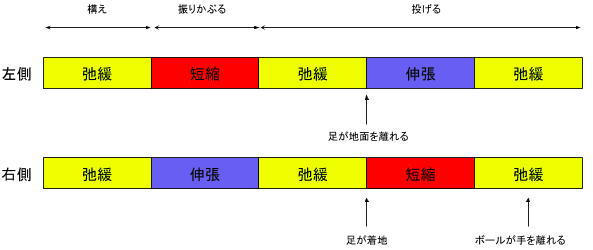
ピッチングにおける広背筋の活動サイクル
6-5. バッティング
次は野球のバッティングにロコムーブの動き、主に左右の広背筋の活動サイクルを取り入れた動きを解説する。


上は7コマに切り取られたバッティングの動作である。ここにも左右一対の広背筋の活動サイクルが存在する。その広背筋の活動サイクルのあり方はゴルフのスイングに類似する。
最初のコマは構えである。ここから2コマ目で、向って右側の広背筋が短縮する。それによって後方脚側股関節を中心とした骨盤、腰椎、胸椎の連動的内旋が起こる。胸郭が向って左側に回旋していきます。一方、向かって右側の広背筋は伸張する。
それが3コマ目で切り替え点を迎える。浮いた右脚の膝関節が伸展し始めることがそのきっかけである。ここからスイングが開始される。今まで大きく伸張していた向かって右側の広背筋が短縮に切り替わる。大きく伸張された広背筋は3コマ目、4コマ目にかけて前方脚側股関節を中心とした骨盤、腰椎、胸椎の連動的内旋が起こる。向かって右方向に胸郭を回旋させる。その胸郭の回旋に腕が同調することでバットを振る。一方、向かって左側の広背筋は弛緩している。
左右一対の広背筋の活動サイクルとしては下のようになっている。
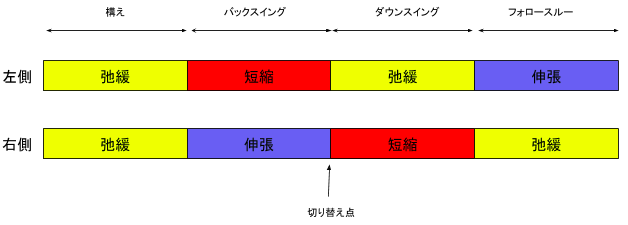
バッティングにおける広背筋の活動サイクル
7. 胸椎伸展のための運動学習プログラム
まずは胸椎を伸展させることに慣れ、左右の広背筋の活動サイクル、股関節伸展筋群の伸張性収縮といった機能を活用できるような動作を行うことは難易度が高い。多くの人にとって広背筋を主働筋とする活動や、股関節伸展筋群の伸張性収縮は経験の無い未知のものである。
そこでロコムーブは運動学習のアプローチをとっている。左右の広背筋の活動サイクルを形成するための要素を分解し、その分解された関節運動を一つ一つトレーニング動作として繰り返すことで神経系に動作の要素を学習させていくものである。
ここからは、その運動学習の一つ一つのトレーニング種目を解説する。
運動学習トレーニング種目1: フェニックス
胸椎の伸展と、肩甲帯の伸展は相関性が高い。フェニックスの目的は胸椎の伸展と肩甲帯の伸展を連動して行うことである。肩甲帯を伸展させるにあたって、胸椎の伸展を伴わない場合には、僧帽筋中部の短縮によっても行われてしまうことから、胸椎と肩甲帯の伸展が連動して行うことを運動学習するためのトレーニングである。
動作
<スタートポジション>
- ロコムーブスタンスから動作を開始する。
- 両手を組んで肘を伸ばした状態で胸椎中部を無理なく伸展させる。この時両手の親指を人差し指同士を合わせて突き出す。

<動作プロセス>
- その後、両腕を前から後ろへ頭上に上げる。両腕は耳の後ろに付くようにする。

- 肘関節を軽度に屈曲させながら、肩関節を内転させて、腕を側方に開いていく。手のひらが体幹より後方に位置するようにし、高さが肩の高さまで開く。この動きによって、肩甲帯と胸椎が連動しながら伸展する。

<フィニッシュ>
- 手のひらは地面に対して垂直なるように立てる。
- 上記の動きに合わせて骨盤を上前方に引き上げる。結果的に広背筋が主働筋として活動し、短縮する。
- 下ろした時と逆の起動を辿って腕を真上に挙げて手のひらを合わせる。

注意点
- 両足の外側が並行になっていることを確認すること。両足が外側に開いていると、股関節が外旋する。すると、骨盤が後傾しやすくなり、結果として胸椎が屈曲しやすくなる。そうなると、広背筋を主働筋とした動きが難しくなる。
- 腕を組んで手を頭上に上げた際に、両腕が耳の後ろに位置するようにする。両腕が耳の前に位置するようだと、肩甲帯が伸展させることができず、肩甲帯の伸展と胸椎の伸展を連動させることができない。
- 腕を開いた時に手のひらが地面と垂直に位置するようにする。手のひらが地面に対して斜めに位置してしまうと、手のひらの内旋が肘関節、さらには肩関節まで伝わらない。結果として腕の内旋をさせることができない。
- 腕を開いた時の肘関節の角度が90度~120度の範囲であるようにする。肘関節の角度が90度未満となると、肩甲帯を伸展させる動作が広背筋ではなく、僧帽筋中部による動作に変わる。広背筋を主働筋とした動作にならなくなる。
- 開いた時の腕の位置が、体幹より後方に位置するようにする。腕の位置が体幹よりも前方に位置してしまうと、腕を開く動作が肩甲帯を伸展させない。広背筋を主働筋とした動きを引き出せなくなる。
- 開いた時の手のひらが、体幹に対して側方を向いているように位置させる。手のひらが前方を向いてしまうと、腕を内旋させることができない。
- 腕を開いた時に足の前方に荷重がされている必要がある。足の後方に荷重されてしまうと、後方に倒れてしまわないように腹筋が短縮する。広背筋を主働筋とした動作にならない。
補助
指導者の判断によって以下の補助を行うことで、より実践者がより強い体感を得ることができる。
- 実践者が腕を側方に開いて行く際に、指導者が骨盤上部を左右の手で押し引き上げる。肩甲帯の伸展と胸椎の伸展と連動した、広背筋の主動筋としての短縮を実践者が意識しやすくなる。
- 実践者が腕を側方に開いて行く際に、僧帽筋中部の緊張により肩の関節が挙上されてしまっている場合には、広背筋の主働筋としての働きは十分に起こらない。そのような場合には、指導者は実践者の鎖骨部分を上から軽く抑えることで実践者に僧帽筋中部の緊張を解くように促すことができる。
運動学習トレーニング種目2: カンガルー
前方への身体移動(歩行、走行)においては、遊脚中期から後期にかけて空中脚側を前方に振り出すために股関節および膝関節が屈曲する。ここに、左右の広背筋の活動サイクルを取り入れると、この時空中脚側の広背筋が短縮して、空中脚側の骨盤の挙上が起こる。
この空中脚側の骨盤の挙上が股関節伸展筋群の起始点を挙上させる。同時に空中脚側股関節の屈曲によって股関節伸展筋群はストレッチされる。そのストレッチのため伸張性収縮状態になる。この空中脚側の股関節伸展筋群は膝関節の伸展をきっかけに短縮を始めるが、その際これまでの伸長性収縮によって蓄えられた張力エネルギーによって勢いよく短縮する。その勢いによって股間節は勢いよく伸展し、初期接地時により大きな地面反力を生む。
カンガルーは両側同時ではあるが、この遊脚中期から後期にかけての股関節伸展筋群のストレッチと広背筋の短縮が連動して起こる動作を運動学習するためのトレーニングである。
動作
<スタートポジション>
- ロコムーブスタンスから動作を開始する。
- 骨盤に手を当てて、両肘を体の中心に近くなるように左右を寄せ、肩甲帯を伸展させる。

<動作プロセス>
- 足が並行になるよう、両足の間と両膝の間が股関節が等しい幅に開くように位置させる。胸をまっすぐ伸ばしたまま、骨盤を後方に引く。それによって股関節伸展筋群が伸張性収縮する。

<フィニッシュ>
- 股関節伸展筋群が伸張性収縮によって溜まった縮む力で、勢い良く骨盤を膝の真上の位置に立ち上がる。
- 元の位置に戻る。

注意点
- 両足の外側が並行になるように立つ。それによって股関節は軽度内旋する。両足の外側が左右に開く位置で立つと、股関節が外旋されてしまう。よって骨盤が後傾しやすく股関節の曲がる角度を十分でなくなってしまうので注意。
- 胸椎が軽度伸展している姿勢を保つこと。胸椎が軽度伸展していないと、広背筋の主動筋としての活動を引き出せない。よって広背筋の主働筋としての運動と股関節伸展筋群のストレッチの連動した動きを引き出すこともできない。
- 動作中に膝が前後に動かないように保つ。動作中に膝が前後に動いてしまうと、骨盤を後方に引く動作が必ずしも股関節を屈曲させない。膝関節を屈曲させるように作用してしまう。
- 両肘が体の中心に向かって左右を寄せる。両肘が左右に開いてしまうと、肩甲帯が伸展しないため、広背筋の主動筋として活動を引き出せない。
- 骨盤を引いた際に、両足の外側に荷重がされているように姿勢を保つ。両足の内側に荷重がされていると、膝が股関節の真下ではなく、内側に入ってしまうため股関節の屈曲がしにくくなる。
補助
補助は特になし。
運動学習トレーニング種目3: チーター
普段骨盤の上には様々な内臓があり、その重さは常に骨盤にかかっている。チーターは股関節90度以下の深い前傾姿勢を形成した状態で脊柱全体を直線的に配置する。上半身を前傾させることにより、骨盤を内臓の重さから開放し、その高い自由度のもと骨盤の前傾・挙上の動作を行うのがチーターである。同時に胸椎・肩甲帯の伸展の動作、及び、股関節伸展筋群の伸張性収縮を連動して行う。
動作
<スタートポジション>
- 股関節を90度〜120度屈曲させた前傾姿勢を形成する。
その際、脊柱の頚椎〜尾骨までを一直線上になるようにする。
足圧は踵やや前方の中足部にくるようにする。
<動作プロセス>
- 股関節の角度や脊柱は構えの状態のまま、鎖骨を開くように肩甲帯を伸展させる。

<フィニッシュ>
- 両手は股関節の位置に添えてフィニッシュを迎える。

注意点
- 構えの時にできるだけ、脊柱を真っ直ぐになるよう伸展させる。
構えで脱力して休むようにしないようにする。
ハムストリングス・内転筋群に伸長感を感じる。 - 構えの時の足圧は踵ではなく、中足部MP関節上に配置する。
- 構えからフィニッシュに向かって、肩甲帯を屈曲しないで腕を引き上げる。
- フィニッシュ時に手をお腹に引き付けず、股関節に添える位置にする。
補助
指導者の判断によって以下の補助を行うことで、より実践者がより強い体感を得ることができる。
- 前額面上で股関節〜膝関節〜足関節を垂直に配列した状態が形成できたら、大腿部内側を把持して股関節内旋の補助を加える。
付録. ロコムーブ・ウォークのランチョロスアミーゴ方式との比較
付録としてロコムーブ・ウォークの特徴を代表的な歩行分析の方法であるランチョロスアミーゴ方式との比較を掲載する。
- 初期接地時の矢状面上での接地点と股関節と上半身重心の距離が近接
- 荷重応答期の股関節・膝関節の屈曲が小さい
- 荷重応答期間が約1/2に短縮
前脛骨筋・大腿四頭筋・中殿筋の遠心性収縮による衝撃吸収時間の短縮 - 前遊脚期間が約1/3に短縮
- 両脚支持期が1/2以上短縮
- 片脚支持期の延長
- 立脚後期(加速期間)の延長
- 支持脚の足部MP関節上での回転軸期間の延長。踵・足関節の回転軸期間の短縮
- 遊脚側の上半身重心が高く・体幹前傾が大きい
- 遊脚中期の足関節のクリアランス消失
- 床反力作用点と重心線の距離が長く、身体重心に生じる加速度が大きい
- 足関節回転軸の消失
- 胸郭と骨盤が同一方向に回旋することで、歩幅の拡大
以下にその中でも特に特徴的なものについて述べる。
広背筋の主動作筋化 - ロコムーブ・ウォークは広背筋を主動作筋として【伸張〜短縮〜弛緩】のサイクルを適切に促進することで機械効率の良い重心移動を実現するための方法論と言える。
広背筋は胸郭・骨盤を中心とした回旋に対抗する回転モーメントを生み出す。立脚中期の初期はまだ胸郭は中間位ではなく、足関節の直上で中間位となり、forefoot rocker にて伸張期は開始される。反対側が遊脚終期のタイミングで観測肢の広背筋は短縮を開始する。遊脚中期・終期が反対側広背筋の伸張・短縮の切り替え期と言える。この時期は、最も胸郭の回旋の大きな時期であり、中間位に戻すように観測肢広背筋は短縮を行う。この広背筋の活動は胸腰筋膜を通じて反対側の大殿筋の活動を促通させ、遊脚終期〜初期接地の股関節伸展をスムーズにさせる。
下表はランチョロスアミーゴ方式による歩行周期を広背筋の運動を対応させたものである。観測肢は右側、反対側は左側とする。
| 観測肢筋活動(右) | 観測肢歩行周(右) | 左反対側肢筋活(左) | 反対側肢歩行周期(左) |
| 伸張 | 立脚中期 | 弛緩 | 遊脚初期 |
| 伸張 | 立脚終期序 | 弛緩 | 遊脚中期 |
| 短縮 | 立脚終期終 | 弛緩 | 遊脚終期 |
| 短縮 | 前遊脚期 | 弛緩 | 初期接地 |
| 短縮 | 前遊脚期 | 弛緩 | 荷重応答 |
| 弛緩 | 遊脚初期 | 伸張 | 立脚中期 |
| 弛緩 | 遊脚中期 | 伸張 | 立脚後期序 |
| 弛緩 | 遊脚終期 | 短縮 | 立脚後期終 |
| 弛緩 | 初期接地 | 短縮 | 前遊脚期 |
| 弛緩 | 荷重応答期 | 短縮 | 前遊脚期 |
着地点・股関節・上半身重心が矢状面上で近接 - 初期接地において、着地点と股関節と上半身重心が矢状面上で近接する理由として2点考えられる。
1点目は、立脚中期〜後期で蓄えられた広背筋の伸張性の弾性エネルギーが立脚後期終盤に解放されることで大きな加速度が遊脚側に与えられるため、反対側下肢が初期接地するや否や体重の受渡しが速やかに実行されるため。
2点目は、上記の広背筋の弾性エネルギーの解放は、それに引き続く遊脚側の胸郭〜骨盤を挙上し大きな位置エネルギーを獲得する。遊脚側が高い重心位置を形成した状態で初期接地するので、初期接地時の膝関節の屈曲は最小となるため。
荷重応答期の短縮 - 上記の理由により、初期接地時に着地点と股関節〜上半身重心の距離を矢状面上で近接させ荷重応答期の短縮を引き起こしたと考えられる。
この荷重応答期の短縮は、一般的に荷重応答時に衝撃吸収で働いていた前脛骨筋・大腿四頭筋・中殿筋の伸張性収縮の活動時間の短縮をもたらし、上記筋の負担を軽減している。さらに、荷重応答期の短縮は両脚支持期の短縮が起こっていることも意味する。つまり、ロコムーブではランチョ・ロス方式と比較すると単脚支持期が長い歩行形態とも言える。
立脚後期の延長 - ロコムーブでは全立脚期間の中では立脚後期が長い。この理由として、立脚後期の定義として軸脚の踵が浮いた時と定義されておりロコムーブでは遊脚側の重心位置が高位に配置されており踵の浮きが速くMP関節上、いわゆる前足部荷重が長いためと考えられる。
前足部荷重によるMP関節上に回転軸があるメリットとして、重心の移動方向の自由度拡大が挙げられる。MP関節の矢状面に対する軸は母指側の軸は斜め内側を向き、小指側は斜め外側を向く。通常、足関節を回転軸とした場合、足部の向いた方向にしか身体は回転できない。MP関節上であれば身体の回転方向をコントロールしやすいと言える。また、これは股関節の内外旋・内外転の3次元機能の賦活化にも貢献すると言える。一般的に前足部荷重が困難な高齢者が方向転換時に転倒しやすいのは、身体が進もうしている方向と足部回転軸の方向が一致していないことも一因と考えられる。
また、長い立脚後期は床反力作用点と重心線の距離の拡大をもたらす。床反力作用点と重心線の距離は身体が回転する場合の回転半径となるため、回転半径の増大は角運動量の増大をもたらし、身体重心に生じる前方への大きな加速度を生じさせる。また上記と並行して、床反力ベクトルの傾きも大きくなる。
床反力ベクトルは床反力作用点から身体重心へ向かう。よって床反力作用点から身体重心が遠ざかると、床反力ベクトルの傾きも大きくなり、身体重心を押し出す力も大きくなり、身体重心への加速度も大きくなる。つまり、歩行中の加速区間が長いこともロコムーブの特徴と言える。
フットクリアランスの消滅 - 歩行中のつまづき防止のため、遊脚期はフットクリアランスと呼ばれる10〜20mm程度の距離が必要とされている。一般的には遊脚期に足関節を背屈させてこの距離を獲得するのだが、ロコムーブでは遊脚側の骨盤と胸郭が引き上がり、フットクリアランスが獲得されているので足関節の背屈は見られない。